雷达的分辨率
雷达波形$u(t)$的自相关函数主瓣宽度越窄,其距离分辨能力越强。即若要时间(距离)分辨率好,应选择这样的信号,即它通过匹配滤波器后应该输出很窄的主瓣波峰。这样的信号或是具有很短持续时间的脉冲,或是具有很宽频谱的宽带波形。
瑞利时间分辨率:$\delta_t = 1/B$,或等效地,瑞利距离分辨率:$\delta_r = c/{2B}$。
多普勒频率分辨率:$\delta_{fd} = 1/T$,或对目标径向速度分辨率:$\delta_v = \lambda / {2T}$。
总结:
- 雷达的距离/时间分辨率由雷达发射信号的带宽决定。 该带宽可以是瞬时的(如极窄的脉冲),也可以是合成的(通过时间换取,如脉冲持续时间长的线性调频波)。在实际应用中,该宽带信号可是窄脉冲波形、线性调频波形、频率步进波形、随机或伪随机噪声波形及其他任何宽带调制信号。
- 雷达的速度/多普勒分辨率由信号的持续时间决定。 持续时间越长,分辨率越高。可通过发射持续时间长的脉冲或通过多个脉冲的相参积累等实现。
线性调频脉冲LFM
Linear Frequency Modulation,LFM。对雷达波形进行调频得到宽带信号,分为上变频和下变频。
该体制采用宽脉冲发射以提高发射的平均功率,保证足够大的作用距离;而接收时采用相应的脉冲压缩算法获得窄脉冲,以提高距离分辨率,较好的解决雷达作用距离与距离分辨率之间的矛盾。

设线性调频信号为$s(t) = 1/\sqrt{t_p} rect(t/t_p)e^{j(\omega_c t+\pi \gamma t^2)}$
其中$\omega_c$为发射中心频率,$t_p$为脉冲宽度,$\gamma$为线性调频斜率,$B=\gamma t_p$。
包络调制函数为$u(t) = 1/\sqrt{t_p} rect(t/t_p)e^{(j\pi \gamma t^2)}$
随时间变化的频率函数为$f(t)=1/{2\pi}d/{dt} (\omega_c t + \pi \gamma t^2) = \omega_c/{2\pi}+\gamma t$
Matlab仿真代码示例
结果如下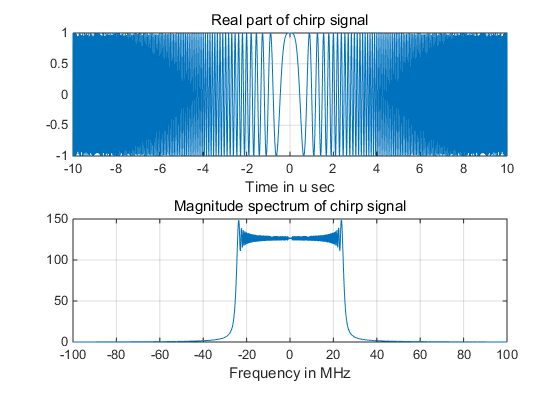
脉冲压缩
线性调频斜率为$\gamma$、脉宽为$t_p$的脉冲,通过匹配滤波器后,时间分辨率为$1/\gamma t_p$。对于雷达接收机而言,相当于输入脉冲的宽度为$t_p$,输出脉冲宽的为$1/\gamma t_p = 1/B$,即输出与输入脉冲宽度之比为$1/\gamma t_p^2$。
在LFM雷达中,$\gamma t_p^2$通常称为时宽带宽积,且有$\gamma t_p^2 \gg 1$。
可见,接收机(匹配滤波器)的输出脉冲宽度在时间上被“压缩”,称之为脉冲压缩(Pulse compression)。
也就是说,为了获得线性调频信号的大带宽所对应的高级了分辨能力,必须对接收到的LFM宽脉冲回波进行压缩滤波处理(匹配滤波),使其变为窄脉冲。
实现上,数字方法有非递归滤波器(时域卷积),正-反DFT(频域分析),后者占用内存少、运算量小、速度快,更长用。
为了抑制旁瓣,减少虚警,常用加权处理。即将匹配滤波器的频率响应乘上某些适当的“窗函数”,在时域中相当于一系列加权函数组成的滤波器和匹配滤波器级联。
Reference: 《雷达系统及信息处理》