我把204b的标准看下来,感觉链路层在整个204b中是最重要且最复杂的地方,因为是在链路层建立的同步链路,且子类1的确定性延迟也是在这里实现的。
同步链路的建立,也就是确定帧边界与多帧边界,这通过三个阶段来实现————CGS、ILAS和DATA,这在入坑记中已经记录过了,CGS是TX发一堆K28.5字符直到RX将SYNC~解除置位,ILAS是按照规定格式发送四个多帧,最后进入数据阶段。
而关注的确定性延迟就是在CGS至ILAS过渡的地方实现的。
同步链路的三个阶段的具体操作去翻入坑记,这里我重新梳理下确定性延迟的实现。
SYSREF信号的作用
标准中对SYSREF的描述是
The purpose of SYSREF is to identify the device clock edge that should be used to align thephase of the internal LMFC and frame clock.
子类1的确定性延迟是通过外部同步信号SYSREF来实现的。可以先想一下,如果没有SYSREF信号,而子类1下204B的各个器件的器件时钟不同,那么每个器件各自会有自己的帧时钟FC和多帧时钟LMFC,由于传输延迟等原因,每个器件的FC和LMFC肯定是不同步的。
如果不要求确定性延迟的话,就算FC/LMFC不同步也没关系,因为只要能确定帧边界,能解帧结构得到原始数据就行。
但是如果要求确定性延迟的话,就必须让FC/LMFC同步,这样只要TX知道自己是在哪个FC/LMFC开始发送的数据,RX知道自己是在哪FC/LMFC接收的数据,就能知道传输延迟是多少并能重复这个延迟的值,由于FC/LMFC都是由器件时钟得来得,所以确定性延迟的衡量精度就是器件时钟。
为了实现FC/LMFC同步,就通过一个外部SYSREF信号,TX和RX都检测这个SYSREF信号,它一有效,TX和RX就把LMFC计数器给重置,这样LMFC就同步了。
最简单的情况我想应该是在系统复位后的CGS阶段,TX和RX检测SYSREF做LMFC同步,这样SYSREF就只需要一个脉冲就可以了。标准中提到SYSREF可以是单脉冲、周期信号或带隙周期信号,当SYSREF为周期信号时,还需要考虑是否每次SYSREF有效都做同步或同步检查,是否重新同步时要求SYSREF信号等,这根据TX和RX的具体实现情况来看,当然最简单的就是SYSREF是和LMFC一样的周期信号,只在复位后的CGS阶段有效SYSREF做同步,以后都忽略SYSREF信号,当然这样的话缺点是以后会有LMFC失去同步的可能。
确定性延迟等于LMFC示例
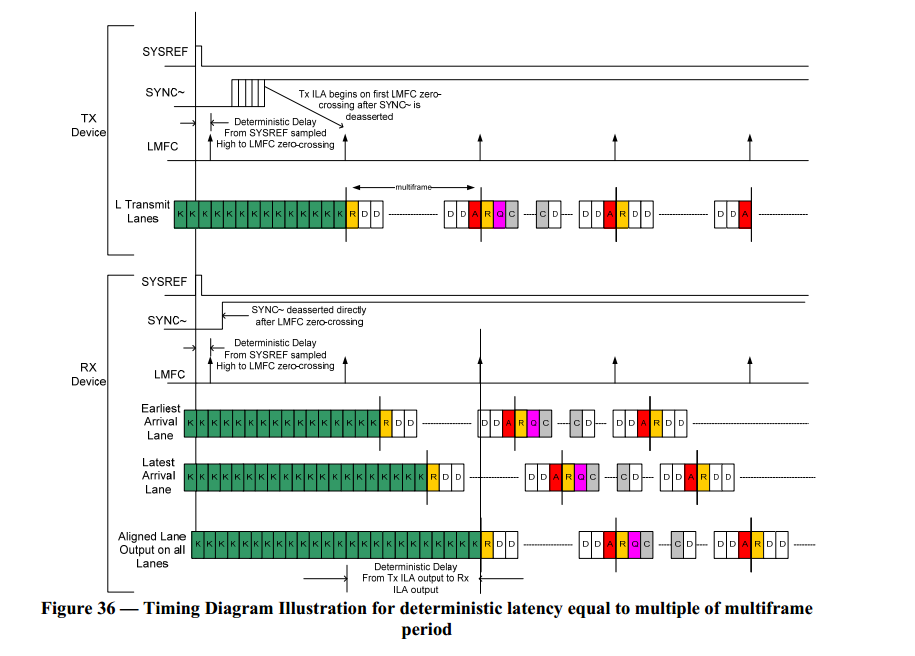
上图是标准中6.3节的示例,确定性延迟等于LMFC。
具体过程就是,CGS阶段TX和RX根据SYSREF同步LMFC,并且RX解除SYNC~,TX检测到SYNC~解除后的第一个LMFC进入ILAS阶段,RX在SYNC~解除后的第二个LMFC释放数据,这样确定性延迟就等于LMFC。
需要注意的是要求总传输延迟小于LMFC,否则当释放数据时还有lane的数据没有到达。
确定性延迟最小示例
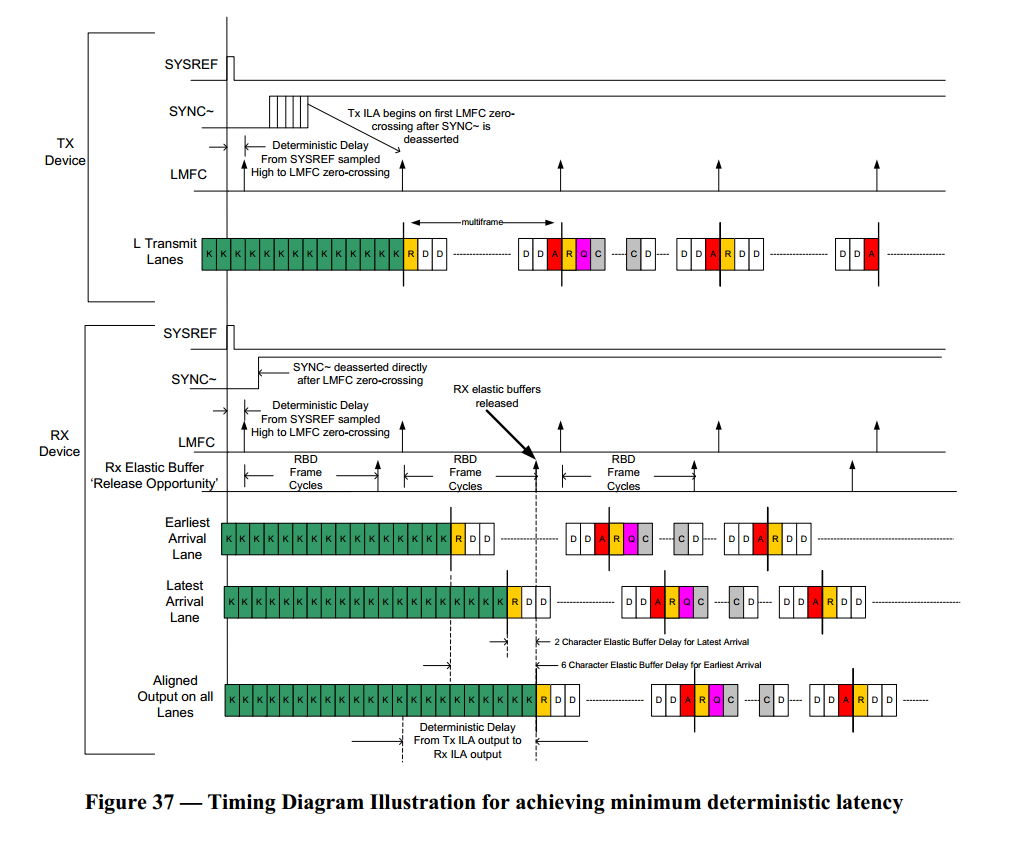
另一种情况是确定性延迟小于LMFC,这时需要自定义RX弹性缓冲区的释放时机。
我一开始对这个“释放时机”的选取不是很理解,看了DA芯片AD9144的实现,有了一点理解。
首先需要知道TX和RX的延迟,由两者得出可能的最大传输延迟,设置LMFC_rx为LMFC的延迟,值就是算出的最大延迟。这里LMFC_rx就相当于示例图中的Release Opportunity。
这样的实现方式我觉得相比上一种要复杂一些,因为还需要查询TX和RX的处理延迟;但相对应的要节约缓冲区资源。在DA芯片上实现时资源有限,选择这样做能理解;而在FPGA上实现时,我觉得上一种要方便一点。
SYSREF的生成
从标准设计来说,SYSREF和DCLK都是从同一源器件生成,并分别连至各个204B器件去的。
根据MS-2433
可使用FPGA为系统提供SYSREF事件。然而,除非它也使用并同步至发送到ADC的主机采样时钟,否则SYSREF信号从FPGA相位对齐至时钟将会很困难。
另一种方法是从FPGA相位对齐至时钟将会很困难。另一种方法由时钟发生或时钟分配芯片提供SYSREF信号,可通过发送至整个系统的信号相位同步至多个时钟。
部署子类1的系统要求
根据MS-2672
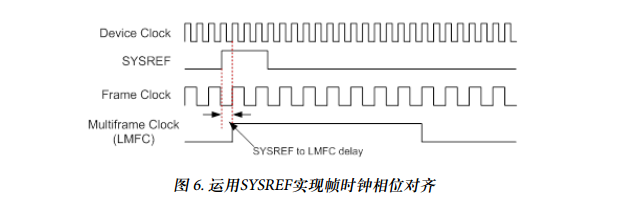
JESD204B系统中确定性延迟的精度和可靠性取决于器件时钟与SYSREF之间的关系。器件时钟为系统参考时钟,而采样时钟(典型情况)、 JESD204B时钟和串行器时钟是从中推导出来的。它用来捕捉SYSREF,并完成帧和多帧时钟的前沿相位对齐。
所以说DCLK越高,所能达到的精度越高,但DCLK不可能无限地高上去,看Note中常以DCLK=2Fs举例说明。
确定性延迟的精度
根据MS-2677的2.1节可知,确定性延迟的精度取决于器件时钟和SYSREF与系统中这些信号的分布偏斜之间的时序关系。也就是SYSREF要满足相对于DCLK的建立保持时间。
但DCLK通常等于或高于采样速率(GHz范围内),这时要达到建立保持时间要求非常困难,所以可能需要对SYSREF相对DCLK的相位偏移进行编程,ADI推荐AD9250。
而AD芯片AD9691的SYSREF建立/保持窗口监测功能就是提供给相位偏移编程使用的。这是在走线长度匹配法之后的“高级解决方法”。
回过头来看一下DLU(deterministic latency uncertainty),当SYSREF捕获的建立和保持时间要求未在系统中每个器件处得到满足时,为最差情况下的DCU = DS_SYSREF + T_DCLK,同时也等于LMFC的对齐误差。其中DS_SYSREF为SYSREF分布偏斜。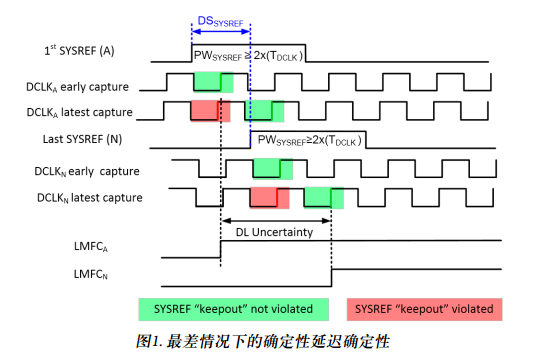
这样的话通常DLU以零点几ns为单位,在许多应用中DLU最差情况能达到可接受水平,也就不必严格控制器件时钟分布偏斜,注意确保SYSREF的脉冲宽度大于等于2T_DCLK即可。
总结下来就是,看DLU是不是满足应用要求,满足的话就把SYSREF脉冲宽度搞宽点,不满足就用走线匹配或者相位偏移编程来调整SYSREF。
另一方面,使用DCLK为采样时钟整数倍的好处,是在多器件同步时,要求DLU=采样时钟的正负1/2,若DCLK为采样时钟的2倍,则刚好可以满足要求,那么只要能做到的话,尽量让DCLK更高。